With 38 degrees of freedom, the highest in the world! The dexterous hand launched by an academician-led team can twist playing cards and thread a needle | Emerging new project
Text by | Fu Chong
Edited by | Su Jianxun
One-sentence Introduction
Beijing Daqi Yuequan Bionic Technology Co., Ltd. is an enterprise dedicated to the R & D of bionic humanoid robots and their core components. Recently, the company launched the bionic dexterous hand "Ying Shou Y-Hand M1", which has 38 degrees of freedom, breaking the current global record for the highest number of degrees of freedom in a dexterous hand.

Ying Shou Y-Hand M1, Image source: Provided by the enterprise
Team Introduction
The company was jointly founded by two founders.
Ren Luquan is an academician of the Chinese Academy of Sciences, a professor at Jilin University, and the honorary president of the International Society of Bionic Engineering.
Ren Lei is a tenured professor at the University of Manchester in the UK and a Changjiang Scholar of the Ministry of Education. He has been deeply involved in the fields of bionic robots and human body science for 25 years.
Products and Business
Yuequan Bionic's products mainly include two series of dexterous hands, "Xin Shou X-Hand" and "Ying Shou Y-Hand", as well as two series of humanoid robots: the full - size general - purpose embodied intelligent wheeled humanoid robot "Bo Wen W - Bot" and the bipedal humanoid robot "Bo Xing X - Bot".
The "Ying Shou Y-Hand M1" has 38 degrees of freedom and full - hand tactile perception, comprehensively surpassing rigid dexterous hands in multiple key performance indicators.
The overall grip strength of the Ying Shou Y-Hand M1 is 28.7 kg, more than six times that of a rigid hand. It can close all five fingers in 0.2 seconds, with a speed more than three times that of a rigid hand. The repeated positioning accuracy of a single finger tip reaches 0.04 mm, more than twice that of a rigid hand. At the same time, it also has far better compliance and flexibility than rigid hands.

Data comparison of a human hand, Ying Shou Y-Hand M1, and a rigid dexterous hand, Image source: Provided by the enterprise
In addition to the "Ying Shou Y-Hand M1", Yuequan Bionic's latest product matrix also includes the rigid dexterous hand "Xin Shou X-Hand M1", the bipedal humanoid robot "Bo Xing X-Bot", and the wheeled humanoid robot "Bo Wen W-Bot".
Among them, the "Xin Shou X-Hand M1" is a bionic dexterous hand with 11 degrees of freedom and 530 sensitive tactile perception units. The "Bo Wen W-Bot" is the world's smallest chassis wheeled humanoid robot, and the "Bo Xing X-Bot" is a full - size general - purpose bipedal humanoid robot.
The technologies of the company's different products are interrelated.
The robot "Bo Xing X-Bot" can be equipped with the dexterous hands produced by the company to achieve the coordination of full - body movement and fine hand operations; the Xin Shou X - Hand series and the Ying Shou Y - Hand series also learn from each other in terms of tactile algorithms, drive technologies, etc.
Core Barriers
The core technology adopted by the "Ying Shou Y-Hand M1" is derived from the "Bionic Tensile - Compressive Body Robot Theory and Technology" first pioneered internationally by Professor Ren Lei.
The "bionic tensile - compressive body" is a bionic multi - level material structure rigid - flexible coupling system derived from the human skeletal and muscular system. It consists of hard components (such as bones, cartilage, etc.) that mainly bear pressure and soft components (such as ligaments, muscles, tendons, etc.) that mainly transmit tension.
Through more than 20 years of in - depth research on the functional principles of the human skeletal and muscular system and continuous innovative engineering practices in the field of bionic robots, the bionic tensile - compressive body robot theory and technology have finally achieved three disruptive innovations at the theoretical and technical levels.
First, it subverts the traditional rigid hinge - type design, reproduces the natural three - dimensional 6 - degree - of - freedom movement of biological joints, and greatly improves the flexibility and compliance of joints;
Second, based on the self - developed magnetic collector - driven artificial muscle, it reproduces the biomechanical characteristics of human skeletal muscles, realizes high - quality power - to - density ratio drive, and an integrated power system of drive, speed change, and transmission;
Third, based on the bionic multi - level and multi - stage rigid - flexible coupling system design of the human skeletal and muscular system, it can achieve system - level power transmission, energy management, and environmental interaction.
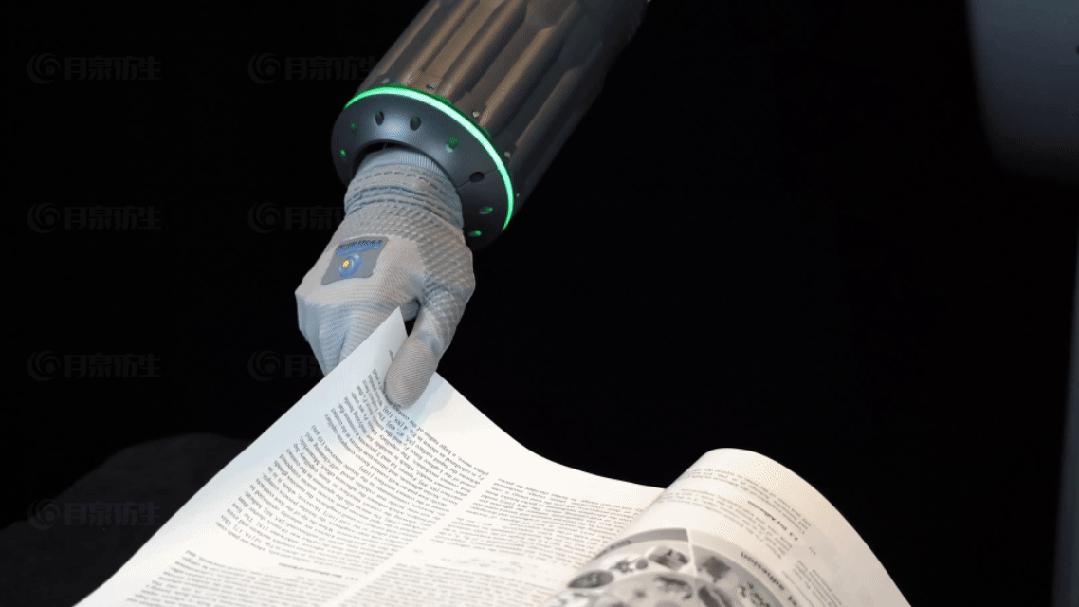
The Ying Shou Y-Hand M1 turning pages, Image source: Provided by the enterprise
Based on the above technologies, the "Ying Shou Y-Hand M1" can handle all 33 types of Feix - classified dexterous grasping and highly human - like fine manipulations.
For example, when twisting a playing card, it can achieve precise and controllable friction between the fingertip and the card surface; when threading a needle, the thumb and index finger can firmly hold the thread end, and the action of slowly passing the thread through the needle eye is smooth, even imitating the slight adjustment amplitude of a human hand.
In addition, the "Ying Shou Y-Hand M1" can also smoothly perform actions such as unscrewing bottle caps and turning books.

The Ying Shou Y-Hand M1 threading a needle, Image source: Provided by the enterprise

The Ying Shou Y-Hand M1 twisting playing cards, Image source: Provided by the enterprise
Founder's Thoughts
Elon Musk once said that the R & D difficulty and workload of a dexterous hand account for half of the development of a humanoid robot. Recent top - tier international academic journals such as Science and Science Robotics all believe that dexterous arm manipulation is one of the most challenging world problems in the field of robot engineering.
The core criteria for evaluating a dexterous hand are "being able to do the work" and "doing the work well", that is, task coverage ability and success rate. To enter the production front - line, its task success rate must be close to the about 98% level of a human hand.
If the number of degrees of freedom of a dexterous hand is too low, it will affect flexibility; if it is too high, it will increase costs and complexity. The Ying Shou Y - Hand M3 series will achieve about 70 degrees of freedom, reaching or exceeding the level of a human hand.

Schematic diagram of a bionic tensile - compressive body dexterous arm, Image source: Provided by the enterprise
Highly dexterous bionic hands have great application potential in fields such as intelligent manufacturing (e.g., automobile manufacturing, 3C product manufacturing), inspection and maintenance, and national defense and military. They can complete dexterous and fine tasks that traditional rigid grippers and rigid hands cannot, greatly improving production efficiency and product quality.
As long - term target application scenarios, household services and elderly care put forward much stricter requirements for dexterous and compliant manipulation and human - robot safety than industrial scenarios, which also means that more technical difficulties need to be overcome.
Fatigue life, durability, etc. are important components of cost - effectiveness, with lower long - term use costs. Therefore, Yuequan Bionic's dexterous hands do not engage in price wars. Instead, they first define functions, scenarios, and requirements. In industrial applications, stable, reliable, and high - quality task completion is more important than low prices.
High - degree - of - freedom dexterous hands need to be combined with a new type of bionic embodied intelligent large - scale model, integrating multi - source perception, understanding of the physical world, delicate design of the body, and bionic neuromuscular control.