38 Freiheitsgrade, die weltweit höchste Anzahl! Diese dexter Hand, entwickelt von einem Team um Akademiker, kann Karten drehen und Nadeln fädeln | Ein neues aufstrebendes Projekt
Text | Fu Chong
Redaktion | Su Jianxun
Kurzvorstellung
Beijing Daqi Yuequan Bionic Technology Co., Ltd. ist ein Unternehmen, das sich auf die Forschung und Entwicklung von ganzheitlichen bionischen humanoiden Robotern und deren Kernkomponenten konzentriert. Das kürzlich von der Firma vorgestellte bionische Handgerät "Ying Shou Y-Hand M1" verfügt über 38 Freiheitsgrade und bricht damit den bisherigen Weltrekord für die Anzahl der Freiheitsgrade von Handrobotern.

Ying Shou Y-Hand M1, Bildquelle: Unternehmen
Teamvorstellung
Das Unternehmen wurde von zwei Gründern gemeinsam gegründet.
Ren Luquan ist Akademiker der chinesischen Akademie der Wissenschaften, Professor an der Jilin-Universität und Ehrenpräsident der Internationalen Gesellschaft für Bionische Ingenieurwissenschaften.
Ren Lei ist Professor für Lebenszeit an der Universität Manchester in Großbritannien und "Changjiang Scholar" des Ministeriums für Bildung. Er hat sich seit 25 Jahren intensiv mit bionischen Robotern und Humanwissenschaften beschäftigt.
Produkte und Geschäftstätigkeiten
Die Produkte von Yuequan Bionic umfassen hauptsächlich zwei Reihen von Handrobotern, nämlich die "Xin Shou X-Hand" und die "Ying Shou Y-Hand", sowie zwei Reihen von humanoiden Robotern, nämlich den ganzheitlichen universellen Radroboter "Bo Wen W-Bot" und den zweibeinigen humanoiden Roboter "Bo Xing X-Bot".
Das "Ying Shou Y-Hand M1" verfügt über 38 Freiheitsgrade und eine taktile Wahrnehmung der gesamten Hand. Es übertrifft in mehreren wichtigen Leistungskennzahlen die herkömmlichen starren Handroboter.
Die Greifkraft des gesamten Handschuhs des Ying Shou Y-Hand M1 beträgt 28,7 kg, was mehr als das Sechsfache der starren Hand ist. Die fünf Finger können in nur 0,2 Sekunden geschlossen werden, was mehr als das Dreifache der Geschwindigkeit der starren Hand ist. Die Wiederholgenauigkeit der Spitze eines einzelnen Fingers beträgt 0,04 mm, was mehr als das Doppelte der starren Hand ist. Gleichzeitig verfügt es über eine weitaus höhere Weichheit und Flexibilität als die starre Hand.

Datenvergleich zwischen menschlicher Hand, Ying Shou Y-Hand M1 und starrer Handroboter, Bildquelle: Unternehmen
Neben dem "Ying Shou Y-Hand M1" umfasst das neueste Produktportfolio von Yuequan Bionic auch den starren Handroboter "Xin Shou X-Hand M1", den zweibeinigen humanoiden Roboter "Bo Xing X-Bot" und den Radroboter "Bo Wen W-Bot".
Der "Xin Shou X-Hand M1" ist ein bionischer Handroboter mit 11 Freiheitsgraden und 530 empfindlichen taktilen Wahrnehmungseinheiten. Der "Bo Wen W-Bot" ist der weltweit kleinste Radroboter mit einem Fahrgestell, und der "Bo Xing X-Bot" ist ein ganzheitlicher universeller zweibeiniger humanoider Roboter.
Die Technologien der verschiedenen Produkte des Unternehmens sind miteinander verwandt.
Der Roboter "Bo Xing X-Bot" kann mit den von der Firma hergestellten Handrobotern ausgestattet werden, um die Koordination zwischen der Ganzkörperbewegung und der feinen Handhabung zu ermöglichen. Die Xin Shou X-Hand-Reihe und die Ying Shou Y-Hand-Reihe beziehen sich auch aufeinander bei der taktilen Algorithmenentwicklung und der Antriebstechnologie.
Schlüsselkompetenzen
Die Kerntechnologie des "Ying Shou Y-Hand M1" stammt aus der international ersten "Theorie und Technologie der bionischen Zug-Druck-Körper-Roboter", die von Professor Ren Lei entwickelt wurde.
Der "bionische Zug-Druck-Körper" ist ein bionisches mehrstufiges Materialstruktur-System mit einer Kombination aus Starrheit und Weichheit, das sich vom menschlichen Knochen-Muskelsystem ableitet. Es besteht aus harten Bauteilen (z. B. Knochen, Knorpel usw.), die hauptsächlich Druck aufnehmen, und weichen Bauteilen (z. B. Bänder, Muskeln, Sehnen usw.), die hauptsächlich Zugkräfte übertragen.
Die Theorie und Technologie der bionischen Zug-Druck-Körper-Roboter haben durch mehr als 20 Jahre eingehender Forschung über die Funktionsprinzipien des menschlichen Knochen-Muskelsystems und kontinuierliche innovative Ingenieurpraxis im Bereich der bionischen Robotik schließlich drei umwerfende Innovationen auf theoretischer und technologischer Ebene erzielt.
Erstens wird das traditionelle starre Gelenkdesign überwunden, und die natürliche dreidimensionale Bewegung mit 6 Freiheitsgraden der biologischen Gelenke wird wiederhergestellt, was die Flexibilität und Weichheit der Gelenke erheblich verbessert.
Zweitens wird auf der Grundlage der selbst entwickelten magnetischen Sammelstromantriebs-Künstlichen Muskeln die Biomechanik der menschlichen Skelettmuskeln wiederhergestellt, was eine Antriebsleistung mit hoher Leistungsdichte und ein integriertes Antriebssystem für Antrieb, Geschwindigkeitsänderung und Übertragung ermöglicht.
Drittens kann auf der Grundlage des bionischen mehrstufigen Starr-Weich-Kopplungssystems des menschlichen Knochen-Muskelsystems das System-Level der Kraftübertragung, Energiemanagement und Umweltinteraktion realisiert werden.
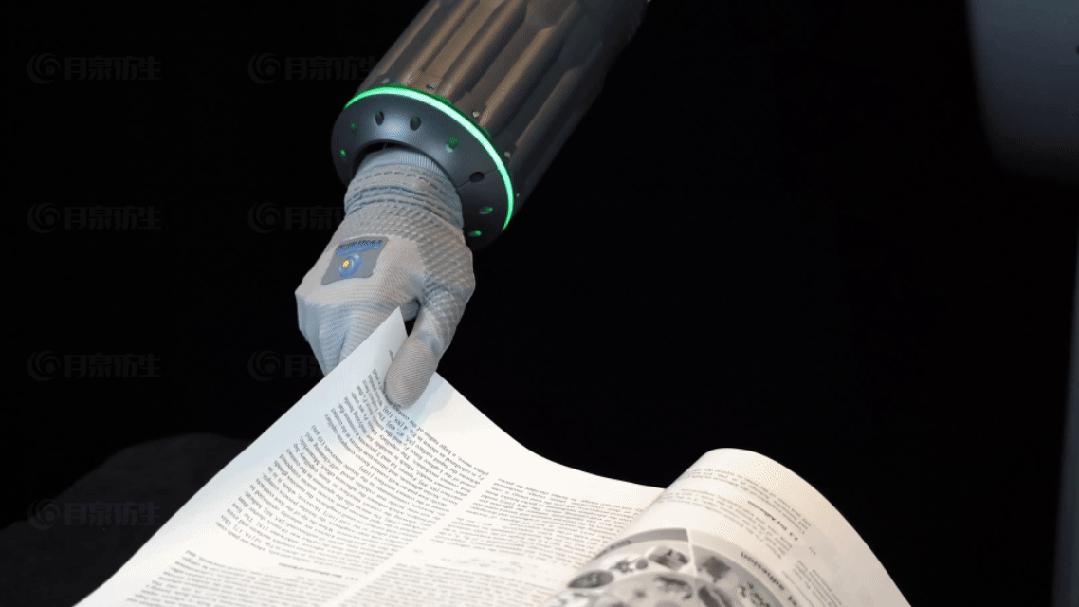
Ying Shou Y-Hand M1 blättert durch Seiten, Bildquelle: Unternehmen
Basierend auf der obigen Technologie kann das "Ying Shou Y-Hand M1" alle 33 Feix-Klassifikationen von feinen Greifbewegungen und hochgradig menschenähnliche feine Manipulationen ausführen.
Beispielsweise kann es beim Drehen von Spielkarten eine präzise und kontrollierbare Reibung zwischen den Fingerspitzen und der Kartenoberfläche erzielen. Beim Nähen kann der Daumen und der Zeigefinger die Fadenenden fest halten und sanft durch das Nadelöhr führen, wobei es sogar leichte Anpassungen wie beim Menschen nachahmen kann.
Darüber hinaus kann das "Ying Shou Y-Hand M1" auch glatt Tätigkeiten wie das Öffnen von Flaschenkappen und das Blättern durch Bücher ausführen.

Ying Shou Y-Hand M1 näht, Bildquelle: Unternehmen

Ying Shou Y-Hand M1 dreht Spielkarten, Bildquelle: Unternehmen
Denken der Gründer
Elon Musk hat einmal gesagt, dass die Forschung und Entwicklung der Handroboter die Hälfte der Arbeit und Schwierigkeiten bei der Entwicklung von humanoiden Robotern ausmacht. Die internationalen Top-Fachzeitschriften wie Science und Science Robotics halten die feine Manipulation der Arme für eines der größten Herausforderungen in der Robotik.
Der Kern der Bewertung von Handrobotern liegt in ihrer "Arbeitsfähigkeit" und "Arbeitsqualität", d. h. in ihrer Fähigkeit, Aufgaben abzudecken und die Erfolgsquote. Um in die Produktionsebene zu gelangen, muss ihre Aufgabenerfolgsquote nahezu 98 % der menschlichen Hand erreichen.
Eine zu geringe Anzahl von Freiheitsgraden beeinträchtigt die Flexibilität der Handroboter, während eine zu hohe Anzahl die Kosten und Komplexität erhöht. Die Ying Shou Y-Hand M3-Reihe wird etwa 70 Freiheitsgrade erreichen, was das Niveau der menschlichen Hand erreicht oder sogar übertrifft.

Schematische Darstellung eines bionischen Zug-Druck-Körper-Hand-Arms, Bildquelle: Unternehmen
Hohe Flexibilität der bionischen Hände hat ein großes Anwendungspotential in Bereichen wie der Intelligenten Fertigung (z. B. Automobilherstellung, Herstellung von 3C-Produkten usw.), Inspektion und Wartung, Verteidigung und Militär. Sie können feine Aufgaben ausführen, die herkömmliche starre Greifer und starre Hände nicht bewältigen können, was die Produktivität und die Qualität der Produkte erheblich verbessert.
Die Anwendungsgebiete der Haushaltsdienste und Altenpflege stellen als langfristige Ziele höhere Anforderungen an die feine Manipulation und die Sicherheit der Mensch-Roboter-Interaktion als die industriellen Anwendungen. Dies bedeutet auch, dass mehr technische Herausforderungen zu bewältigen sind.
Die Dauerhaftigkeit und die Lebensdauer sind wichtige Bestandteile des Kostennutzenverhältnisses. Die Langzeitkosten sind niedriger. Daher setzt Yuequan Bionic bei seinen Handrobotern nicht auf Preiswettbewerb, sondern definiert zunächst die Funktionen, Anwendungsfälle und Anforderungen. In der industriellen Anwendung ist die Zuverlässigkeit und die Qualität der Aufgabenausführung wichtiger als ein niedriger Preis.
Hohe Flexibilität der Handroboter erfordert die Kombination mit einem neuen bionischen Embodied AI-Modell, das die Integration von multi-modalen Sensoren, das Verständnis der physischen Welt, das feine Design des Roboters und die bionische neuromuskuläre Kontrolle umfasst.