A tactile perception company founded by a Shanghai Jiao Tong University team and already implemented in ZHIYUAN Robots has received tens of millions of yuan in financing | Exclusive Report by Yingke
Author | Huang Nan
Editor | Yuan Silai
Yingke has learned that Qianjue Robotics Technology (Shanghai) Co., Ltd. (hereinafter referred to as "Qianjue Robotics") recently completed a financing of tens of millions of yuan. The latest round was invested by Yuanhe Origin, Gobi Partners, and Xiaomiao Langcheng. The funds will be used for technology R & D investment, product iteration, and to accelerate the mass - production and delivery speed.
Founded in May 2024, "Qianjue Robotics" focuses on the R & D of multi - modal tactile perception and operation technology for fine robot operations. Its core products include high - resolution multi - modal tactile sensors, intelligent tactile perception and control modules, etc. The founder, Ma Daolin, is an associate professor at Shanghai Jiao Tong University. In the field of tactile sensors, he proposed a robot operation path of "constructing spatial perception through touch and contact", and for the first time achieved high - precision motion tracking of grasped objects based on touch.
In complex environments, solutions relying solely on visual sensing face many challenges. Factors such as changes in light intensity, object occlusion, and perspective deformation may all lead to distortion of information perception. In contrast, the tactile solution can effectively overcome the above limitations and gradually show unique advantages in the research of embodied intelligence.
Tactile sensors can sense the distribution and magnitude of contact forces in real - time and provide high - precision and high - timeliness feedback data. Based on this tactile feedback, the dexterous hands of robots can dynamically adjust operation strategies, including adaptively adjusting grasping force, optimizing finger postures, and adjusting motion trajectories, thereby improving the stability and accuracy of operations and ensuring the efficient execution of tasks.
When handling soft, fragile, or irregularly shaped objects, tactile sensors enable robots to accurately perceive the material properties and contour information of objects.
For example, during the process of test - tube handling and operation, tactile sensors can help robots sense the smoothness and brittleness of test tubes in real - time and monitor the dynamic changes of the liquid inside. On this basis, robots can precisely adjust the grasping force, optimize the holding posture, and control the shaking amplitude during liquid mixing or transfer, thereby reducing the risk of test - tube breakage and liquid spillage and ensuring the stability and safety of operations. This ability significantly improves the adaptability of robots in fine - operation scenarios.
On the hardware side, "Qianjue Robotics" has self - developed the multi - modal high - precision tactile sensor G1 - WS. This sensor is specially designed for robot grippers and can provide multi - modal, high - resolution tactile information. The information sensing density is up to 800 times that of human fingers, enabling it to sense subtle object features and deformations and provide high - precision tactile feedback for fine robot operations.
Take the data collection task of the Zhiyuan Robot AgiBot World as an example. When a robot performs the task of installing a memory module in a computer host, it needs to have sub - millimeter - level fine control ability to avoid damaging the equipment. Among them, the G1 - WS can accurately sense various information including three - dimensional shape, three - dimensional force distribution, and six - dimensional resultant force. The measurement resolution accuracy reaches 50,000 measurement points per square centimeter, the accuracy of the X/Y axis is 0.03 mm, and the accuracy of the Z axis is 0.06 mm. While ensuring ultra - high resolution and accuracy, the processing time for each frame of the depth field is only 10 milliseconds.
This is equivalent to installing a "fingertip nerve" for the robot, which can provide end - tactile sensitivity like nerve fibers and achieve precise docking.
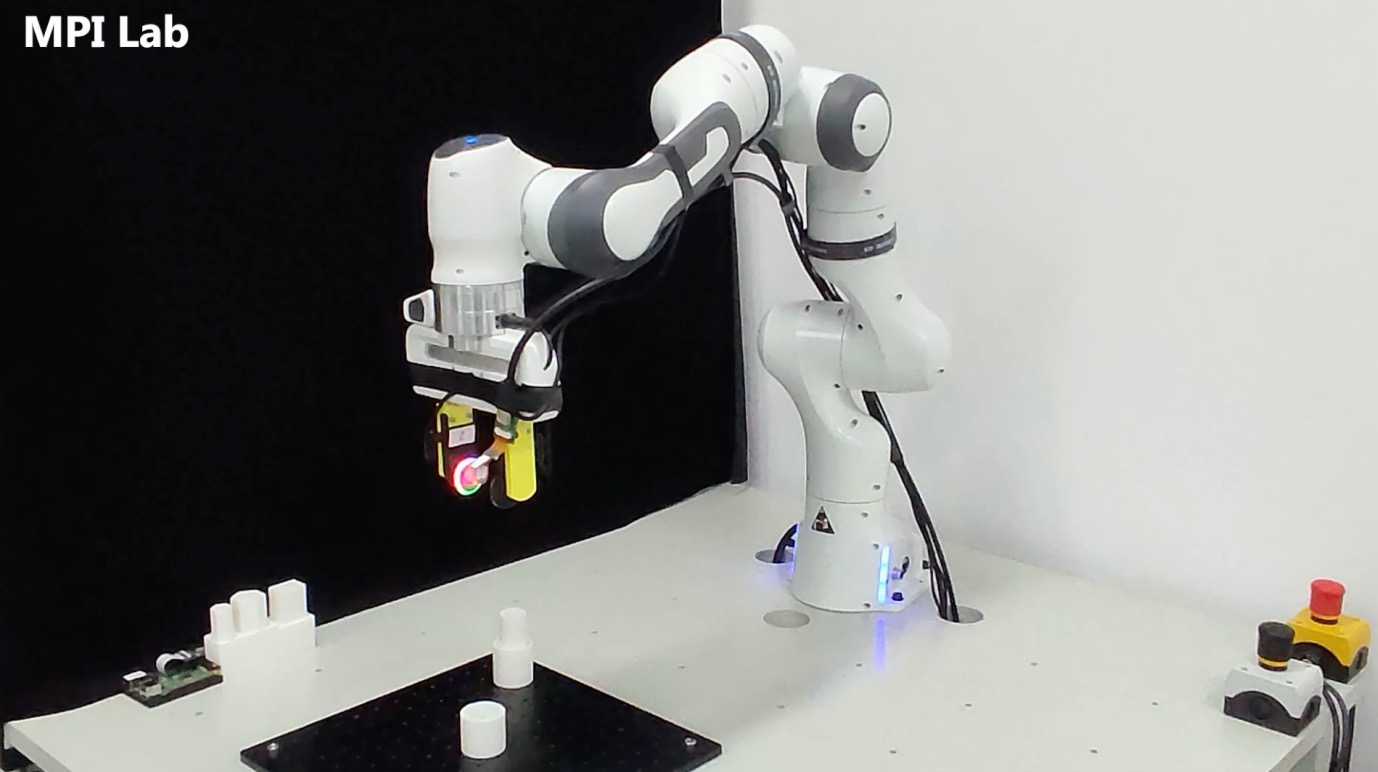
Testing of high - precision tactile perception algorithms in fine robot assembly (Source/Qianjue Robotics)
At the same time, the G1 - WS adopts a wedge - shaped structure, with a narrower front end, which can be used to handle complex working conditions in narrow areas. The thinnest part of the front end is only 5 mm. This means that the G1 - WS can easily reach anywhere that a human finger can touch, providing flexible and precise sensing capabilities to solve complex assembly tasks and precision operations in small spaces.
For a long time, due to the high cost of data collection, the scarcity of high - quality tactile data has become a key bottleneck in the training of robot tactile control algorithms. Synthetic data based on simulation is a crucial part in addressing this challenge.
Recently, "Qianjue Robotics" also released the world's first tactile simulation tool, Xense_Sim, which can accurately simulate tangential motion and force information, filling the gap in previous tangential force simulation technology. The simulation data is more in line with real - world operation scenarios such as unscrewing bottle caps and plugging in interfaces, which helps to improve the generalization ability of training models.
Actual measurement data shows that Xense_Sim has obvious advantages in efficiency and accuracy. While achieving high - precision simulation, it can maintain a high processing speed of 50 Hz per second, ensuring simulation accuracy and real - time performance. Currently, Xense_Sim has been integrated into the Issac Sim simulation platform.
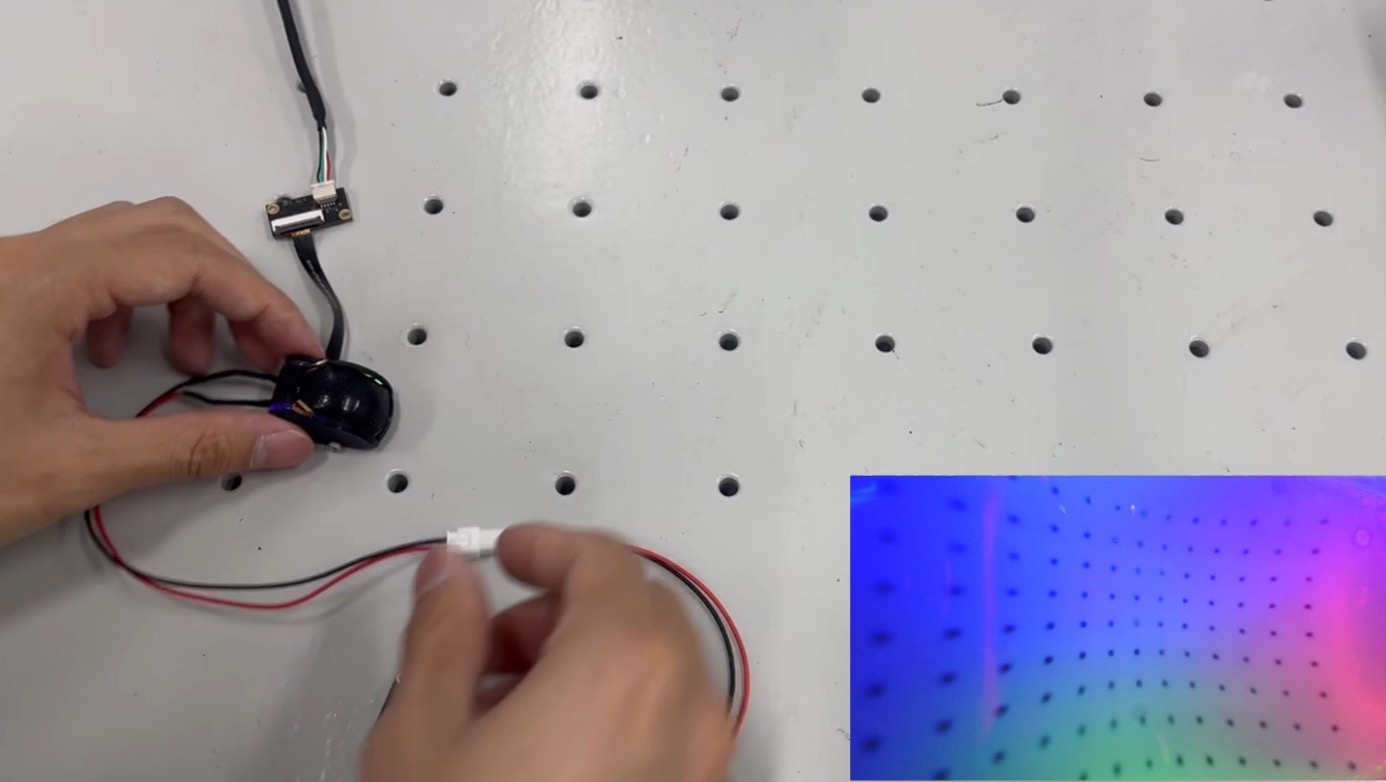
Thumb tactile sensor (Source/Qianjue Robotics)
Yingke has learned that currently, the tactile simulation tool Xense_Sim and the multi - modal high - precision tactile sensor G1 - WS of "Qianjue Robotics" have been applied to the Zhiyuan Robot. Its modular and miniaturized visual - tactile sensors are in the process of mass - production and delivery, which can build a data foundation for the implementation of complex scenarios such as precision assembly, industrial manufacturing, and intelligent services.
In the future, the two parties will conduct collaborative innovation based on the "hardware + simulation + data" level and jointly explore new paths for fine robot operations, adaptability to complex scenarios, and reducing data collection costs through synthetic data.