Von einem Team der Shanghai Jiao Tong Universität gegründet und bereits bei ZHIYUAN Robotics umgesetzt, erhält ein taktiles Wahrnehmungsunternehmen eine Finanzierung von mehreren Millionen Yuan | Erstveröffentlichung von Yingke
Autor | Huang Nan
Redakteur | Yuan Silai
Hard Krueger hat erfahren, dass Qianjue Robotics Technology (Shanghai) Co., Ltd. (im Folgenden als "Qianjue Robotics" bezeichnet) kürzlich eine Finanzierung im Wert von mehreren Millionen Yuan abgeschlossen hat. Die neueste Runde wurde von Yuanhe Origin, Gobi Partners und Xiaomiao Langcheng investiert. Die Mittel werden für die technologische Forschung und Entwicklung sowie die Produktiteration eingesetzt und die Massenproduktion und Lieferung beschleunigt.
"Qianjue Robotics" wurde im Mai 2024 gegründet und konzentriert sich auf die Forschung und Entwicklung von multimodalen taktilen Wahrnehmungs- und Manipulationstechnologien für feine Robotermanipulationen. Die Kernprodukte umfassen hochauflösende multimodale taktile Sensoren, intelligente Module für taktile Wahrnehmung und Steuerung usw. Der Gründer Ma Daolin ist ein Assistentprofessor an der Shanghai Jiao Tong Universität. Im Bereich der taktilen Sensoren hat er einen Robotermanipulationspfad vorgeschlagen, der "auf taktiler Wahrnehmung und Berührung basiert, um die räumliche Wahrnehmung aufzubauen", und erstmals die hochpräzise Bewegungstverfolgung von gegriffenen Objekten auf der Grundlage der taktilen Wahrnehmung realisiert.
In komplexen Umgebungen stehen Lösungen, die ausschließlich auf visuelle Sensorik setzen, vor vielen Herausforderungen. Faktoren wie Änderungen der Lichtstärke, Objektverschattungen und Perspektivverzerrungen können dazu führen, dass die Informationswahrnehmung ungenau wird. Im Vergleich dazu kann die taktile Lösung diese Einschränkungen effektiv überwinden und zeigt in der Forschung zur Embodied Intelligence zunehmend einzigartige Vorteile.
Taktile Sensoren können die Verteilung und Größe der Kontaktkräfte in Echtzeit erfassen und hochpräzise und zeitnahe Rückmeldedaten liefern. Basierend auf diesen taktilen Rückmeldungen kann die dexter Hand des Roboters die Manipulationsstrategie dynamisch anpassen, einschließlich der adaptiven Anpassung der Greifkraft, der Optimierung der Fingerhaltung und der Anpassung der Bewegungsbahn, um so die Stabilität und Präzision der Manipulation zu verbessern und die effiziente Ausführung der Aufgabe zu gewährleisten.
Beim Umgang mit weichen, zerbrechlichen oder unregelmäßig geformten Objekten ermöglichen es taktile Sensoren dem Roboter, die Materialeigenschaften und die Konturinformationen der Objekte genau zu erfassen.
Beispielsweise kann der taktile Sensor dem Roboter beim Transport und der Manipulation von Reagenzgläsern helfen, die Glätte und Sprödigkeit des Reagenzglases in Echtzeit zu erfassen und die dynamischen Änderungen der Flüssigkeit darin zu überwachen. Auf dieser Grundlage kann der Roboter die Greifkraft präzise einstellen, die Greifhaltung optimieren und die Schwingungsamplitude während des Flüssigkeitsmischens oder -übertragens kontrollieren, um so das Risiko des Brechens des Reagenzglases und des Überlaufens der Flüssigkeit zu verringern und die Stabilität und Sicherheit der Manipulation zu gewährleisten. Diese Fähigkeit verbessert die Anpassungsfähigkeit des Roboters in feinen Manipulationsszenarien erheblich.
Auf der Hardwareseite hat "Qianjue Robotics" den selbst entwickelten multimodalen hochpräzisen taktilen Sensor G1 - WS entwickelt. Dieser Sensor ist speziell für Robotergriffe entwickelt und kann multimodale, hochauflösende taktile Informationen liefern. Die Informationsempfindlichkeitsdichte ist bis zu 800 Mal höher als die des menschlichen Fingers und kann feine Objekteigenschaften und Verformungen erfassen, um hochpräzise taktile Rückmeldungen für die feine Manipulation des Roboters bereitzustellen.
Nehmen wir als Beispiel die Datenakquisitionstask des AgiBot World von ZHIYUAN Robotics. Wenn der Roboter die Aufgabe hat, einen Arbeitsspeicher in einen Computer zu installieren, muss er eine submillimetergenaue Feinsteuerung besitzen, um Schäden am Gerät zu vermeiden. Der G1 - WS kann verschiedene Informationen wie dreidimensionale Form, dreidimensionale Kraftverteilung und sechsdimensionale resultierende Kraft präzise erfassen. Die Messauflösung erreicht 50.000 Messpunkte pro Quadratzentimeter, die Genauigkeit in der X/Y - Richtung beträgt 0,03 Millimeter und in der Z - Richtung 0,06 Millimeter. Bei gleichbleibend hoher Auflösung und Präzision beträgt die Verarbeitungszeit pro Tiefenfeld nur 10 Millisekunden.
Das entspricht der Installation eines "Fingernervs" für den Roboter, der eine so empfindliche taktile Wahrnehmung am Ende wie Nervenfasern bietet und eine präzise Ankopplung ermöglicht.
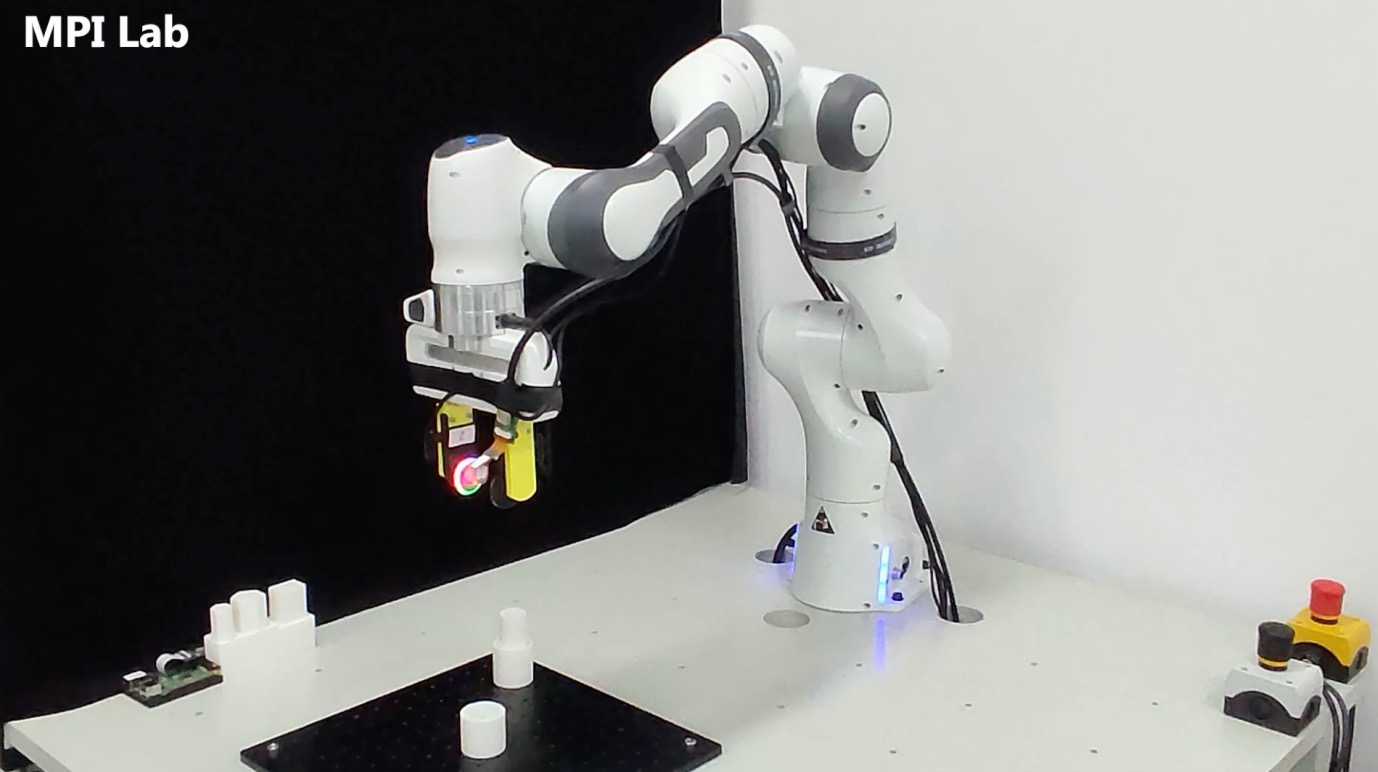
Test der hochpräzisen taktilen Wahrnehmungsalgorithmen bei der feinen Montage von Robotern (Quelle/Qianjue Robotics)
Zusätzlich hat der G1 - WS eine keilförmige Struktur, wobei das vordere Ende schmaler ist und für komplexe Arbeitsbedingungen in engen Räumen eingesetzt werden kann. Die dünnste Stelle am vorderen Ende beträgt nur 5 Millimeter. Das bedeutet, dass der G1 - WS problemlos in alle Stellen gelangen kann, die der menschliche Finger erreichen kann, und eine flexible und präzise Wahrnehmungsfähigkeit bietet, um komplexe Montagetasks und feine Manipulationen in engen Räumen zu lösen.
Seit langem war die Knappheit hochwertiger taktiler Daten aufgrund der hohen Erfassungskosten ein Schlüsselengpass für das Training von taktilen Roboterkontrollalgorithmen. Synthetische Daten auf der Grundlage von Simulationen sind ein wichtiger Schritt, um diese Herausforderung zu bewältigen.
Kürzlich hat "Qianjue Robotics" auch das weltweit erste taktile Simulationswerkzeug Xense_Sim veröffentlicht, das die Tangentialbewegung und die Kraftinformationen präzise simulieren kann und das Problem der fehlenden Tangentialkraftsimulationstechnologie löst. Die Simulationsdaten entsprechen eher realen Manipulationsszenarien wie dem Öffnen von Flaschenkappen und dem Einstecken von Schnittstellen und tragen dazu bei, die Generalisierungsfähigkeit des Trainingsmodells zu verbessern.
Die Messdaten zeigen, dass das Xense_Sim deutliche Vorteile in Effizienz und Präzision hat. Bei der Realisierung einer hochpräzisen Simulation kann es eine hohe Verarbeitungsgeschwindigkeit von 50 Hz pro Sekunde aufrechterhalten, um die Simulationspräzision und Echtzeitfähigkeit zu gewährleisten. Derzeit ist das Xense_Sim in die Issac Sim - Simulationsplattform integriert.
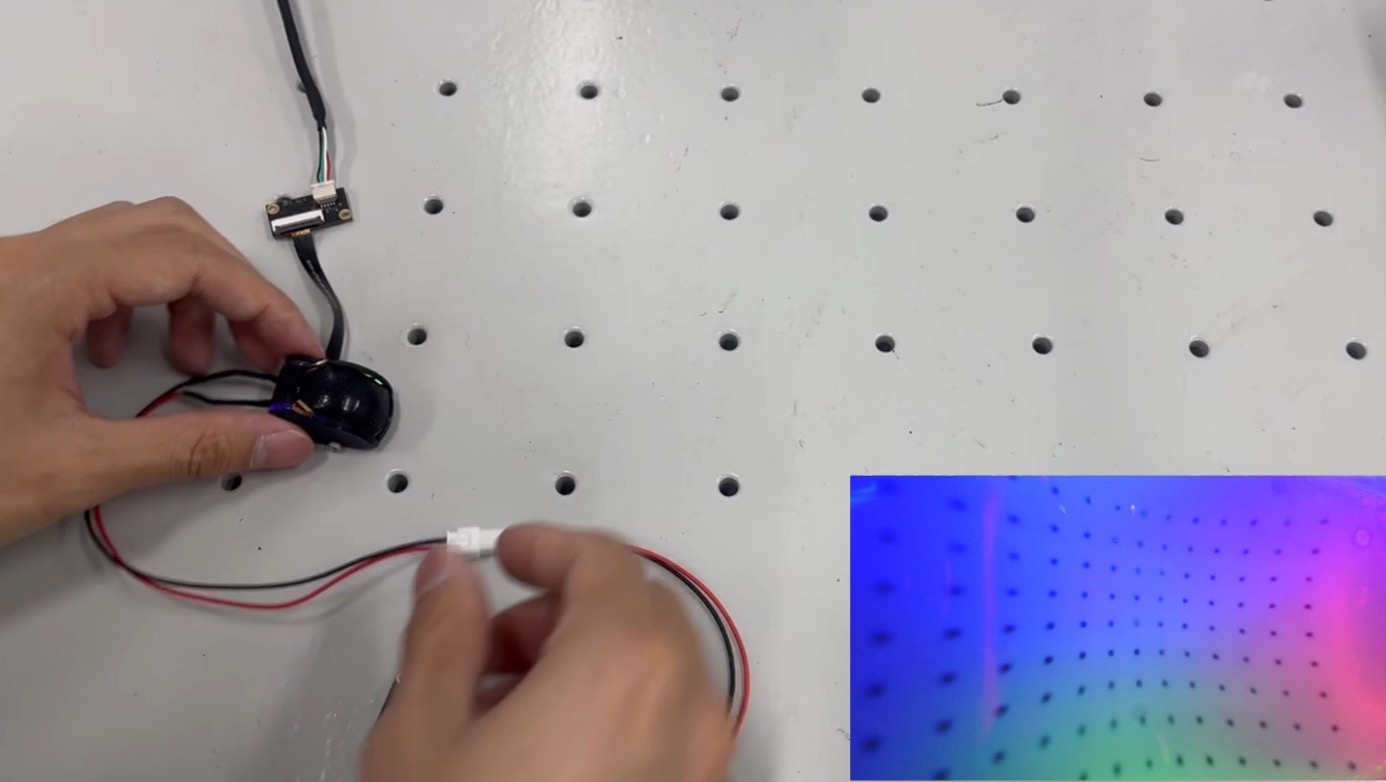
Daumen - taktiler Sensor (Quelle/Qianjue Robotics)
Hard Krueger hat erfahren, dass das taktile Simulationswerkzeug Xense_Sim und der multimodale hochpräzise taktile Sensor G1 - WS von "Qianjue Robotics" derzeit bei ZHIYUAN Robotics eingesetzt werden. Die modularen und miniaturisierten visuell - taktilen Sensoren werden massenproduziert und ausgeliefert und können eine Datenbasis für die Umsetzung komplexer Szenarien wie feiner Montage, industrieller Fertigung und intelligenter Dienstleistungen schaffen.
In Zukunft werden beide Seiten auf der Ebene von "Hardware + Simulation + Daten" kooperativ innovieren und gemeinsam neue Wege für die feine Manipulation von Robotern, die Anpassungsfähigkeit an komplexe Szenarien und die Reduzierung der Datenakquisitionskosten durch synthetische Daten erforschen.