"Zhujidongli" Completed 500 Million Yuan in Financing in Half a Year, Backed by Alibaba, NIO, Lenovo, etc. | Exclusive Report by Yingke
Author | Huang Nan
Editor | Yuan Silai
Hard Kr has learned that the embodied intelligent robot company "Zhujidongli" recently completed its Series A+ financing. It has cumulatively completed a total of 500 million yuan in Series A financing in half a year, receiving strategic support from leading institutions in both the industrial and financial sectors. Many existing shareholders have continued to follow - on invest. Strategic industrial investors include Alibaba Group, China Merchants Group Venture Capital, Shangqi Capital, NIO Capital, Lenovo Capital and Incubator Group, Bianshi Times, and Nice Group. Well - known financial investors include Gao Jie Capital, Oasis Capital, Mingshi Venture Capital, Fengrui Capital, and Nanshan Strategic and Emerging Industry Investment.
Founded in 2022, "Zhujidongli" focuses on three core embodied intelligent technologies: the design and manufacturing of the robot's physical hardware, the cerebellum - based whole - body motion control using reinforcement learning, and the training strategies for the embodied brain model. It focuses on full - size general humanoid robots and has derived products such as bipedal robots.

Multi - form bipedal robot TRON 1
With fully self - developed core hardware and software technologies combined with the humanoid basic model, "Zhujidongli" provides hardware and software systems for humanoid robot bodies and development toolchains for embodied agents to enterprise customers, integrators, and individual developers in various fields based on its general mobile operation platform and embodied intelligent software tools, promoting the wide application of embodied intelligence in scientific research, manufacturing, business, household, and other fields.
Recently, "Zhujidongli" has made a series of key progress in the AI exploration, algorithm research and development, and hardware design and manufacturing of robots.
For a long time, the difficulty of collecting training data has hindered the large - scale implementation of humanoid robots. Embodied intelligent training data mainly includes three types: real data, simulation data, and Internet data. Training with a large amount of diverse and high - quality data can support the robot's self - learning and improve its task decision - making and execution abilities to replace humans in solving problems in the physical world.
Among various types of data, the massive human operation videos in the Internet and large video models have the lowest cost and contain rich physical common sense, behavior trajectories, and operation decision - making paths. However, how to effectively use these data remains a challenge for the industry. For example, human operation videos cannot be directly applied to robot operations. The behavior trajectories and operation data generated by large models have problems such as insufficient accuracy, deviation from physical laws, or hallucinations. Even if the data is accurate, it is difficult to directly use it for robot operations.
In response to the above problems, "Zhujidongli" has released an embodied operation algorithm based on a large video - generation model (VideoGenMotion, abbreviated as LimX VGM). By post - training the existing large video - generation model with human operation video data, only by using scene pictures and operation task instructions as prompts, the entire process of task understanding and splitting, object operation trajectory generation, and robot operation execution can be realized.

LimX VGM workflow (Source: Zhujidongli)
In this workflow, LimX VGM only needs to additionally collect a small amount of human operation video data and extract key information useful for executing operation tasks from the large video - generation model to convert it into robot operation strategies and behaviors. This is the first time in China that human operation data has been directly applied to robot operations, and it can achieve multi - platform generalization.
In terms of hardware, "Zhujidongli" has launched the latest iteration of a full - size humanoid robot with high degrees of freedom, high flexibility, and high stability. By increasing the degrees of freedom of the waist, it helps the robot better adjust its center of gravity, improve posture control, and enhance whole - body balance, achieving more precise body posture control.
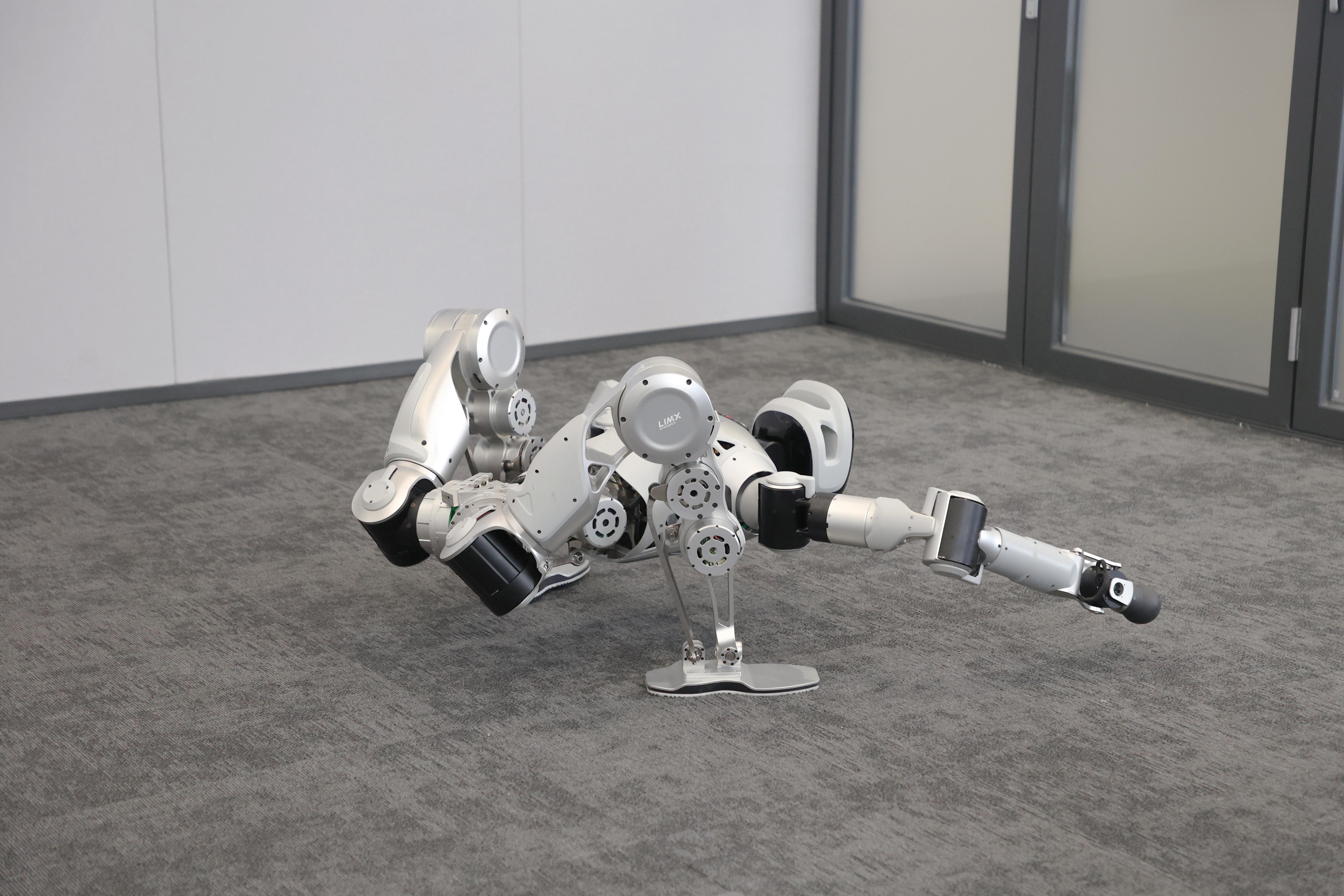
Full - size humanoid robot (Source: Zhujidongli)
The world's first multi - form bipedal robot TRON 1 released by "Zhujidongli" last year adopts a "three - in - one" modular foot design, equipped with three types of foot ends: double - point feet, bipedal feet, and double - wheel feet, which can be quickly assembled and disassembled and freely combined according to the different scenario requirements of different users.
Hard Kr has learned that TRON 1 has completed product deliveries in multiple countries and regions, initially achieving a commercial closed - loop of product design, R & D, mass production, and sales.